Sobre o mePed

O mePed é um robô quadrúpede de código aberto projetado por Scott Pierce da Spierce Technologies, LLC.
Este manual foi originalmente criado por Scott Pierce e traduzido por RoboBuilders .
Os arquivos fonte do hardware podem ser encontrados em: www.meped.io
Informações adicionais, esquemas de fiação e programas de exemplo podem ser encontrados no site oficial do mePed: www.meped.io
⚠️ AVISO:
Peças frágeis. Monte com cuidado para que não se quebrem.
Lista de Parafusos e Porcas:
- 60un - Porca Sextavada M3
- 40un - Parafuso M3 x 10mm
- 16un - Parafuso M3 x 12mm
- 4un - Parafuso M3 x 20mm
Configuração da Posição Central do Servo
Antes de começar a montar seu novo Robô Andante mePed, é importante centralizar todos os 8 servos que vieram com o kit. Os seguintes passos ajudarão a garantir que todos os servos estejam rotacionados para sua posição central ou de 90°.
Fixe um Braço de Servo ao servo e então gire suavemente o Braço de Servo no sentido horário até que o braço pare.
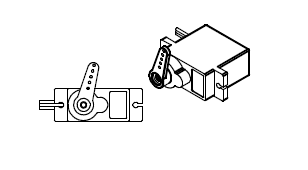
Remova o Braço de Servo do Servo e reposicione-o para ficar perpendicular ao corpo do Servo como mostrado nesta ilustração.
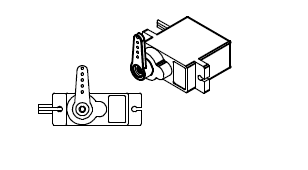
Gire suavemente o Braço de Servo no sentido anti-horário até que o Braço de Servo fique paralelo ao corpo do Servo como mostrado.
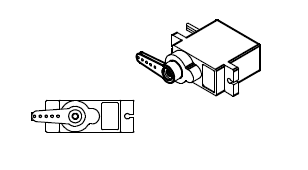
Depois que o Braço de Servo estiver paralelo ao Corpo do Servo, remova o Braço de Servo e reserve-o para montagem posterior.
Montagem da Perna
Repita os Passos 1-5 quatro vezes.
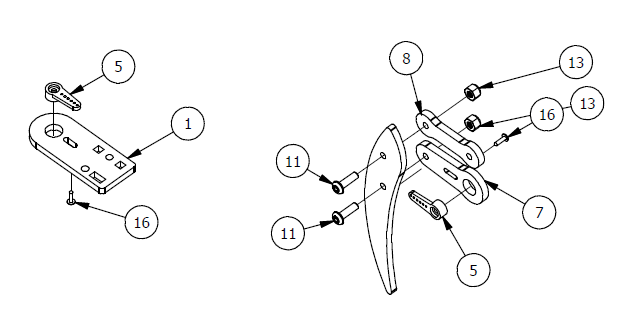
1 - Insira um Braço Simples do Servo em uma Placa de Pivô Superior da Perna e rosqueie um Parafuso de Montagem do Servo no Braço Simples do Servo pela parte traseira da Placa de Pivô Superior da Perna.
2 - Insira um Braço Simples do Servo em um Braço de Servo da Perna e rosqueie um Parafuso de Montagem do Servo no Braço Simples do Servo pela parte traseira do Braço de Servo da Perna.
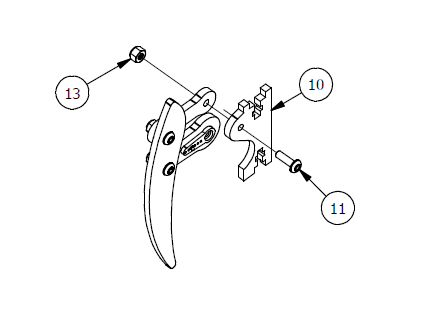
3 - Fixe uma Articulação Paralela da Perna a uma peça de Perna usando um Parafuso M3 x 10mm e uma Porca Simples M3.
4 - Fixe a peça de Perna a um Braço de Servo da Perna usando um Parafuso M3 x 10mm e uma Porca Simples M3.
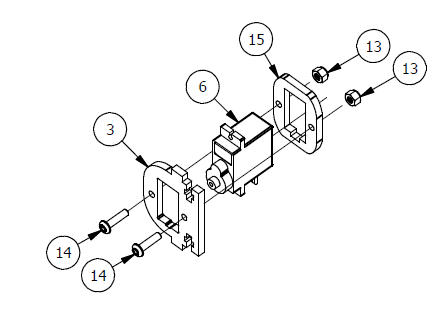
5 - Insira um Servo em um Retentor de Servo.
6 - Insira a extremidade superior do Servo no Suporte de Servo da Perna.
7 - Fixe o Retentor de Servo ao Suporte de Servo da Perna usando dois Parafusos M3 x 12mm e duas Porcas Simples M3.
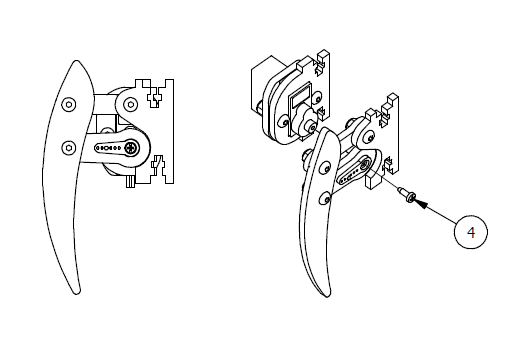
8 - Fixe uma Placa Paralela da Perna à outra extremidade da Articulação Paralela da Perna usando um Parafuso M3 x 10mm e uma Porca Simples M3.
9 - Com o Servo rotacionado para a posição central e a perna posicionada de modo que a Articulação Paralela fique horizontal, fixe o Braço de Servo da Perna ao Servo usando o Parafuso do Braço do Servo fornecido com o Servo.
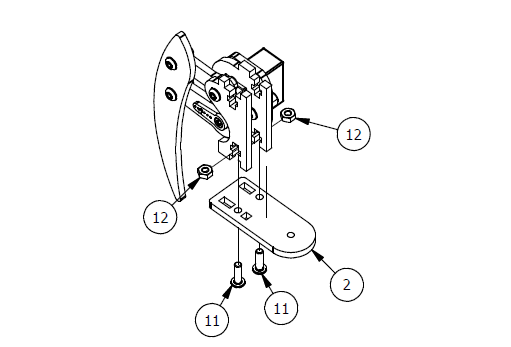
10 - Fixe o Conjunto da Perna dos passos anteriores a uma Placa de Pivô Inferior da Perna usando dois Parafusos M3 x 10mm e duas Porcas Simples M3.
Montagem do Corpo
11 - Fixe quatro Espaçadores do Corpo à Placa Inferior do Corpo usando quatro Parafusos M3 x 10mm e quatro Porcas Simples M3.
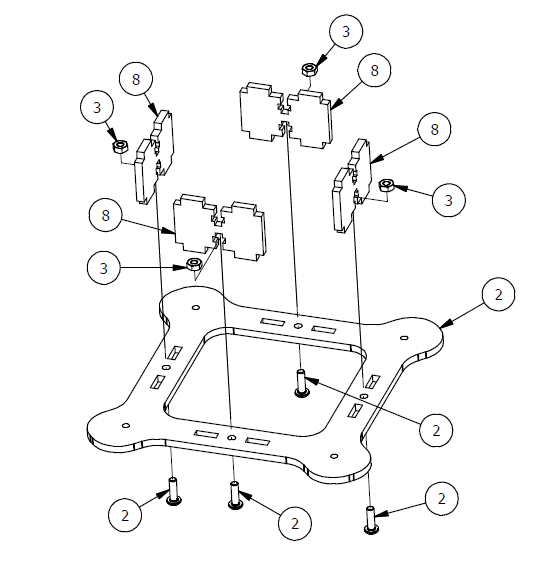
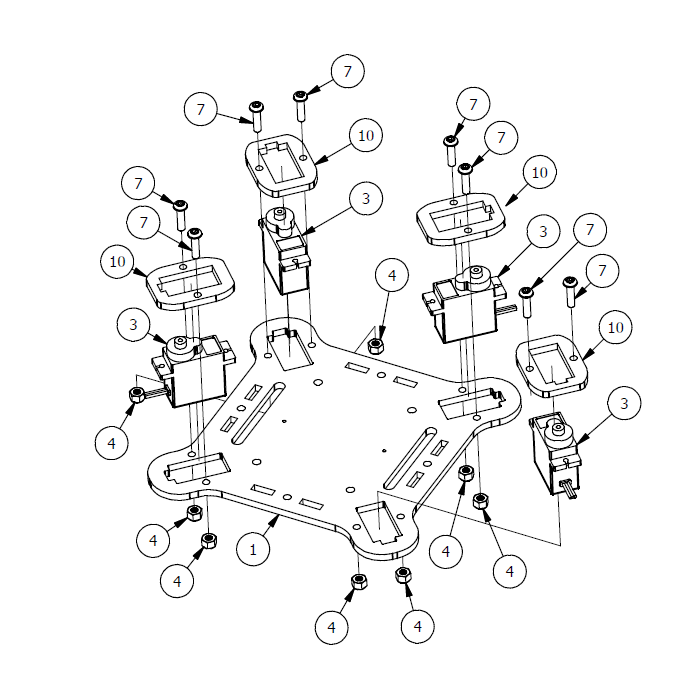
12 - Insira quatro Servos no lado superior da Placa Superior do Corpo.
13 - Deslize um Retentor de Servo sobre o topo de cada Servo.
14 - Fixe cada Retentor de Servo à Placa Superior do Corpo usando Parafusos M3 x 12mm e Porcas Simples M3.
Montagem Final
15 - Fixe cada Conjunto de Perna ao Conjunto da Placa Inferior do Corpo usando um Parafuso M3 x 10mm e uma Porca Simples M3. Não aperte demais estes parafusos. As articulações da perna devem se mover livremente para evitar atrito excessivo que possa causar falha nos servos.
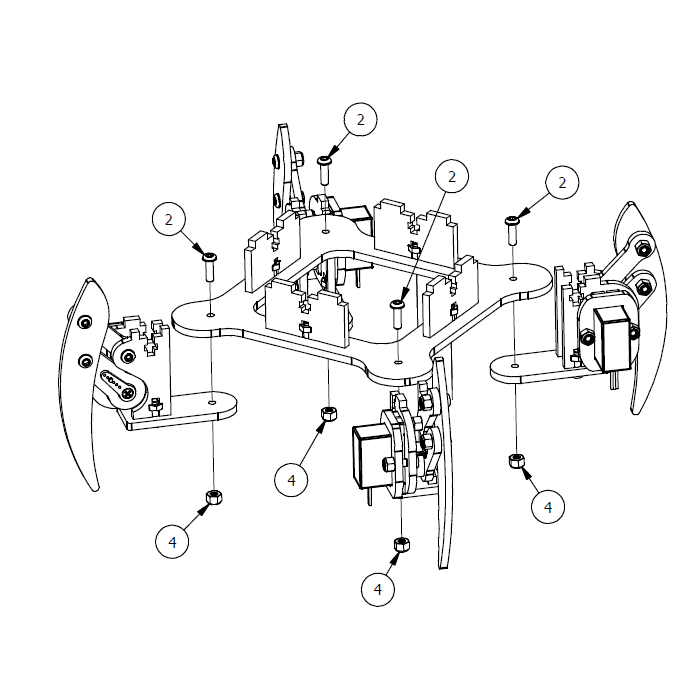
Fixe o Conjunto da Placa Inferior do Corpo ao Conjunto da Placa Superior do Corpo usando quatro Parafusos M3 x 10mm e quatro Porcas Simples M3.
Rotacione cada Perna para que fiquem orientadas em um ângulo de 45° como mostrado. Fixe um Conjunto de Placa de Pivô Superior da Perna a cada Servo de Pivô e Conjunto de Perna usando dois Parafusos M3 x 10mm e duas Porcas Simples M3.
Prenda o Braço Simples do Servo ao Servo usando um Parafuso do Servo.
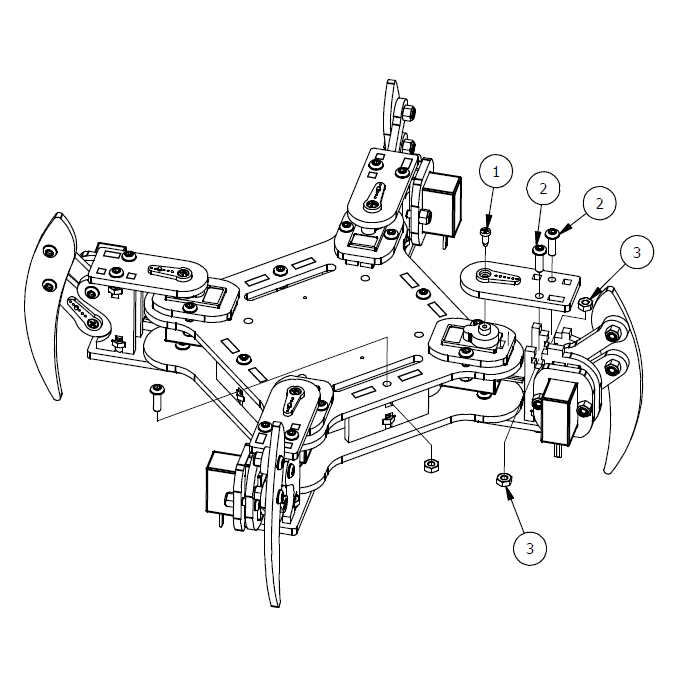
O robô está montado. Agora é necessário efetuar a montagem da parte eletrônica e também efetuar a programação na placa Arduino.