Neste tutorial, mostraremos como usar o meArm com a placa Arduino. Incluindo montagem, conexões e programação. Caso queira adquirir o kit meArm pela nossa loja clique aqui.
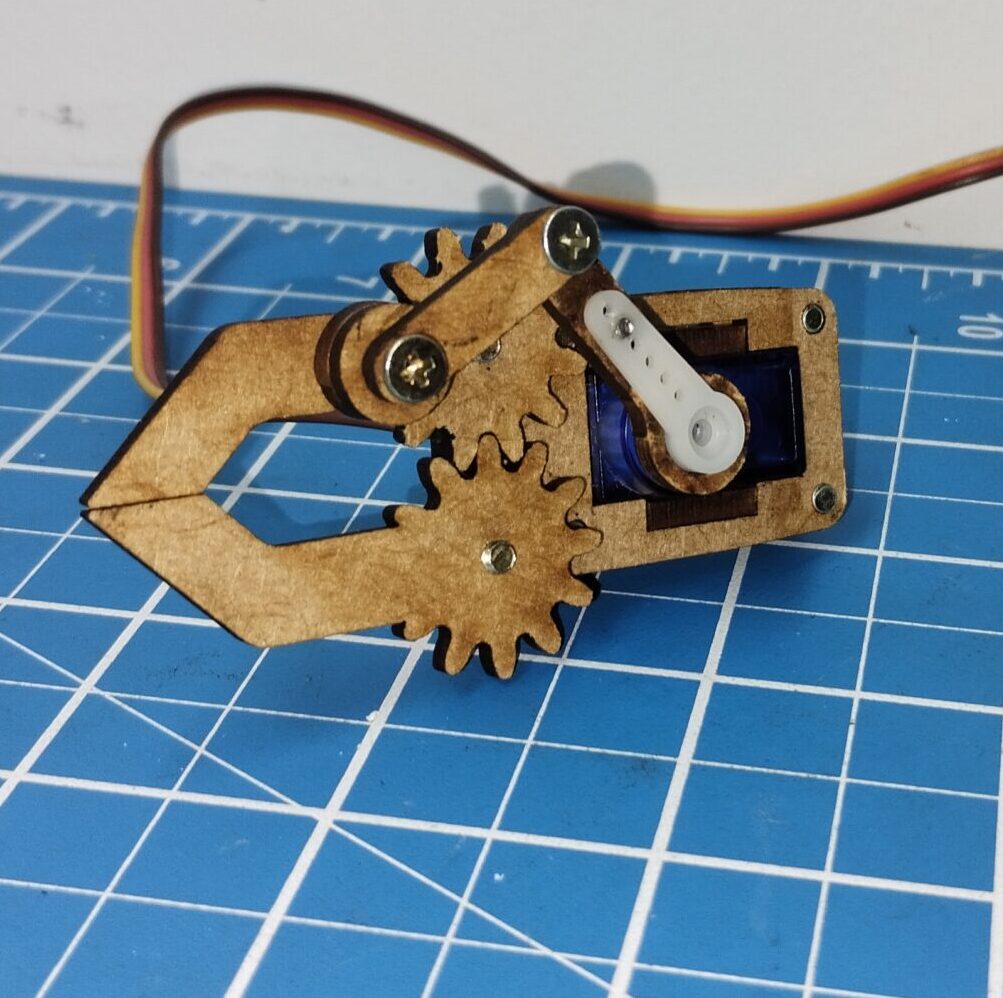
O meArm é um braço robótico de tamanho de bolso, código aberto, projetado por Ben Gray de Nottingham, Inglaterra. É um ótimo projeto para desenvolver habilidades com cinemática, programação e mecânica.
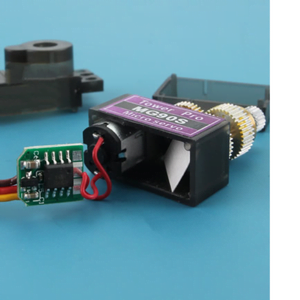
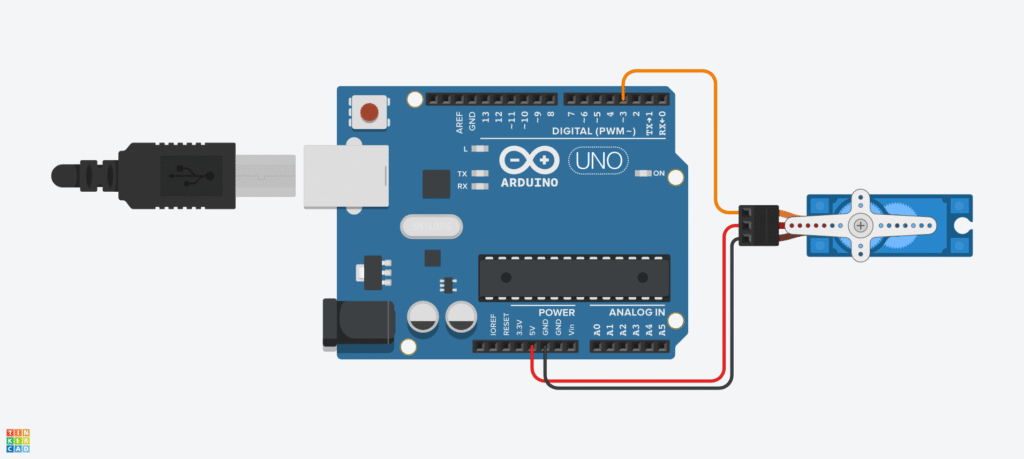
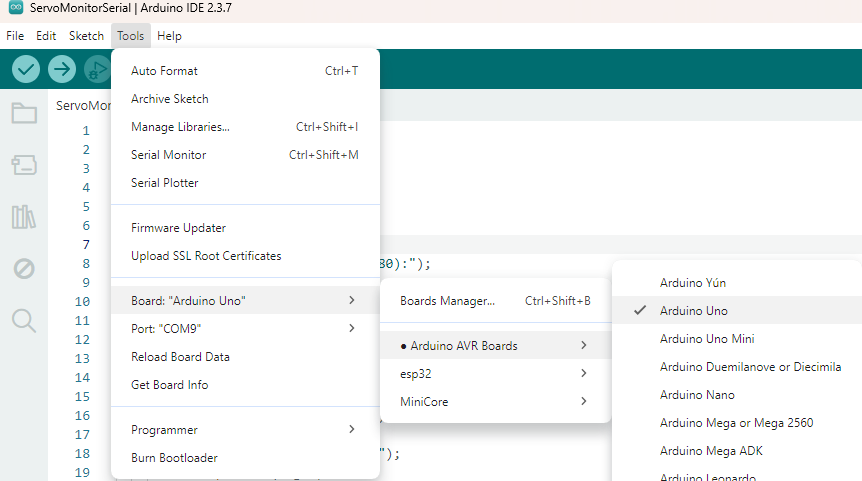
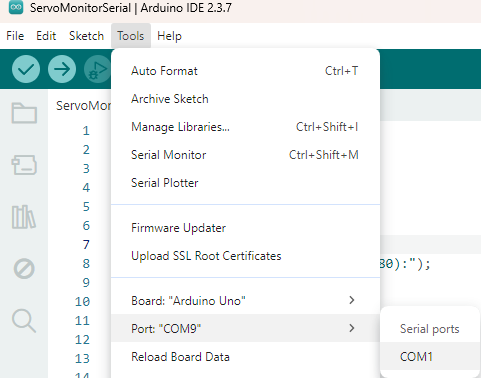
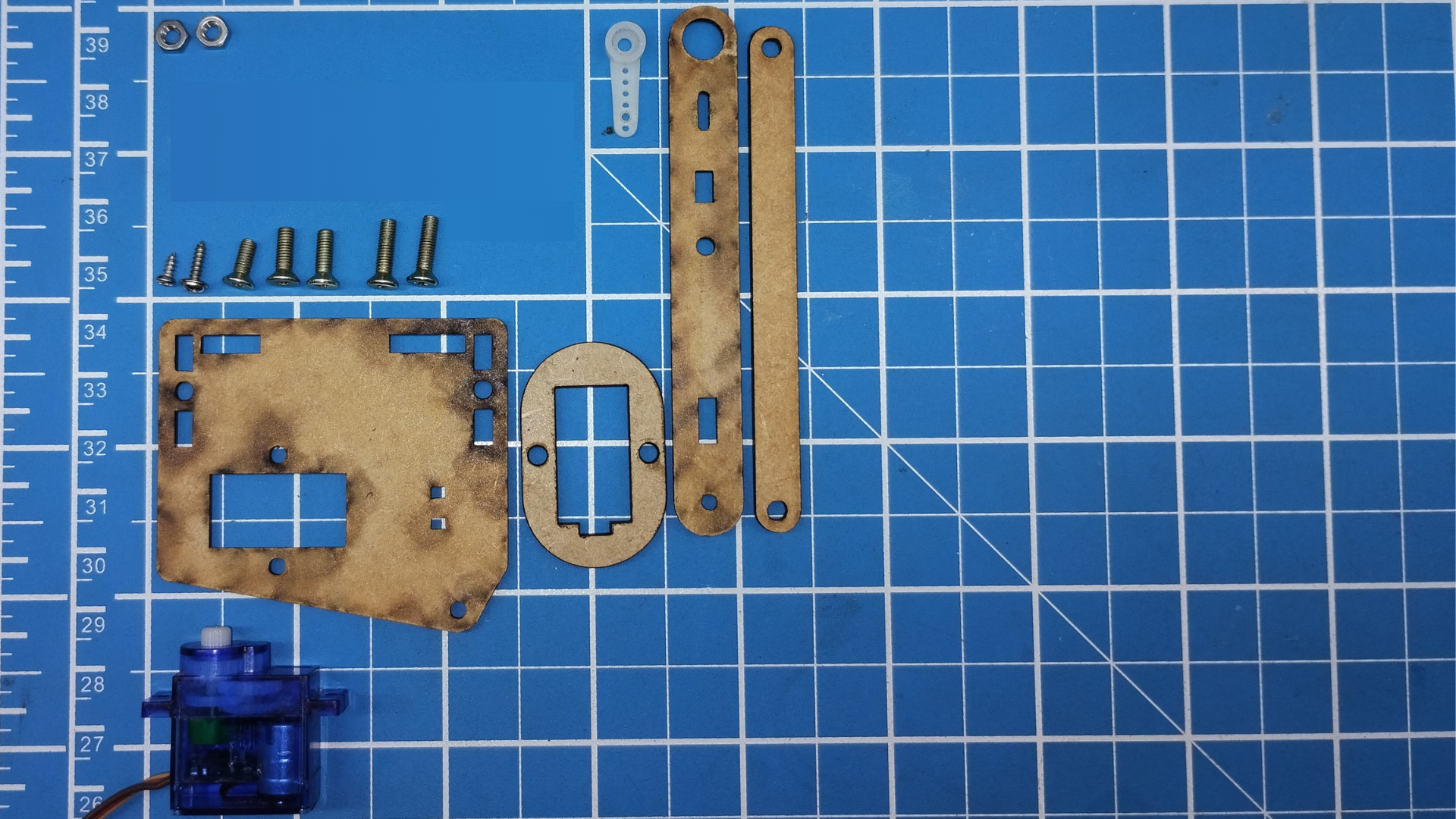
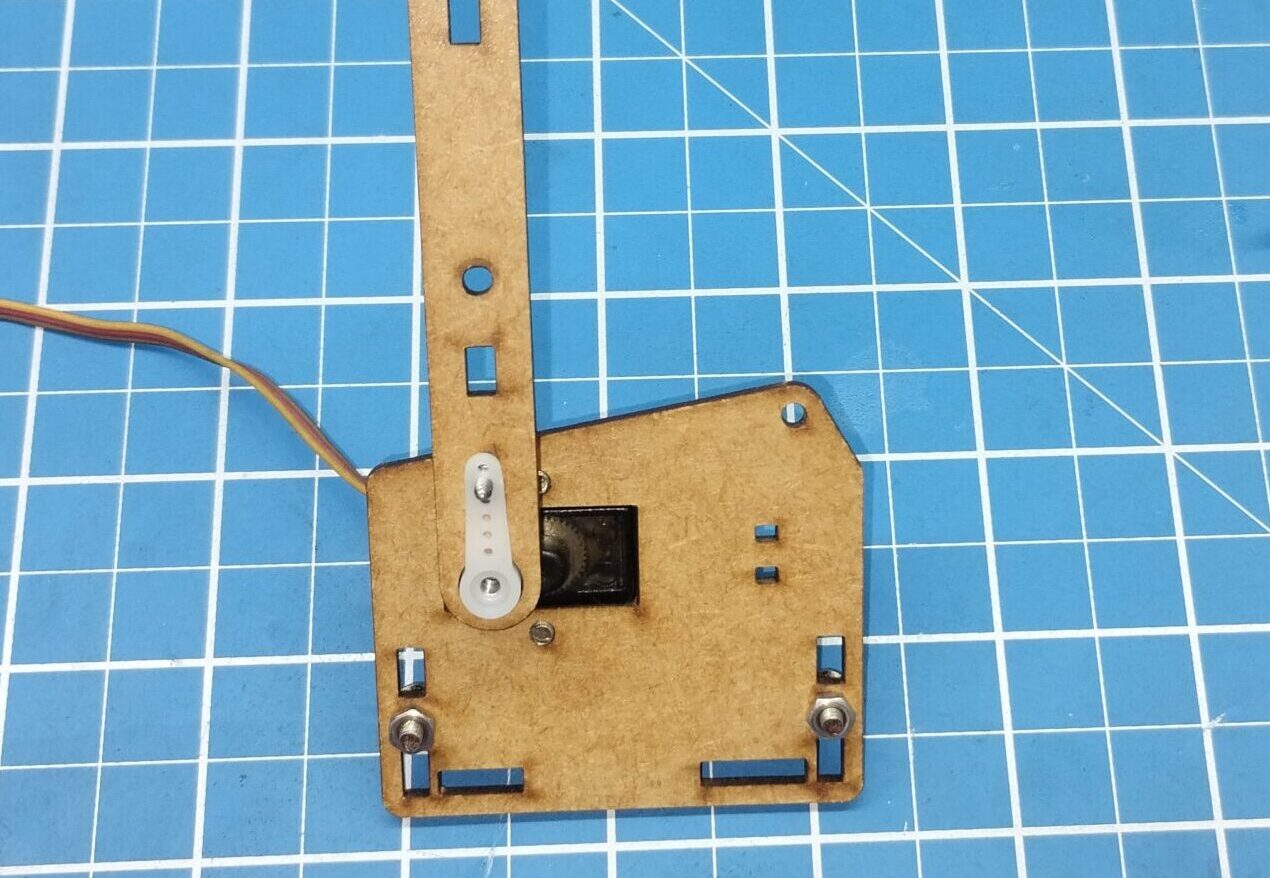
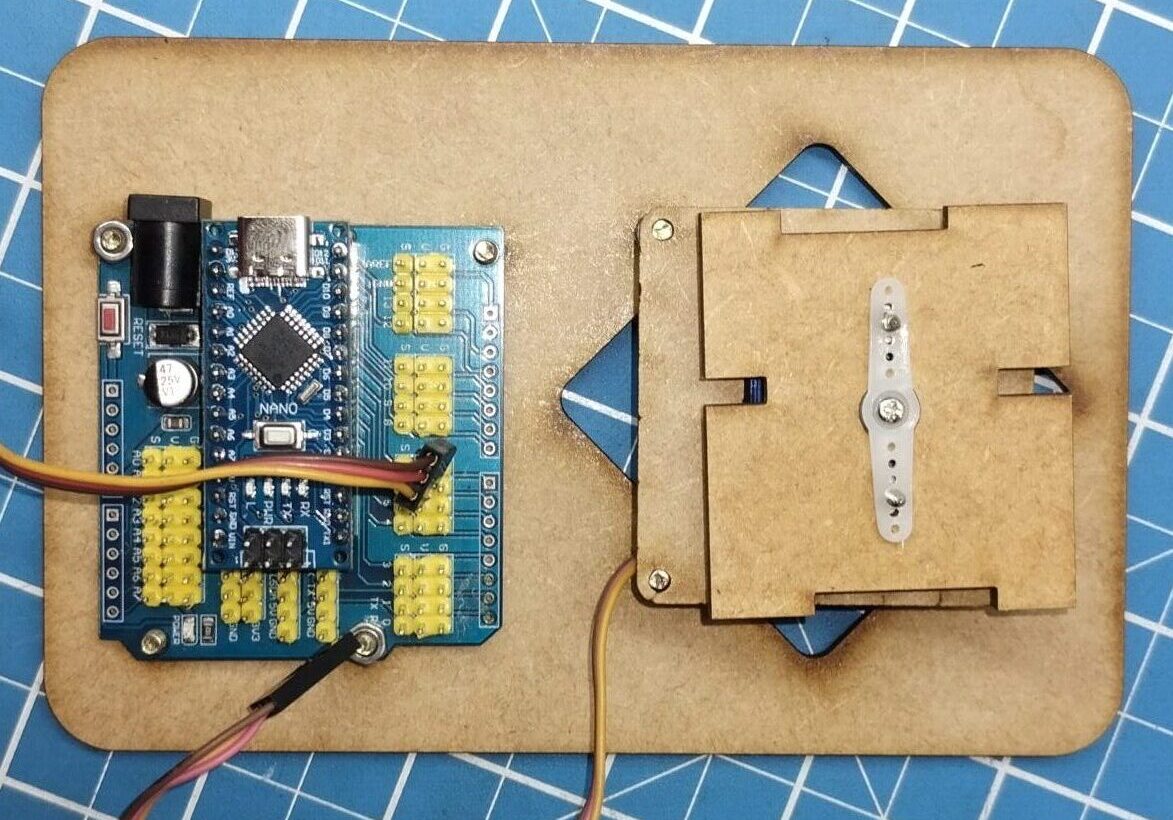
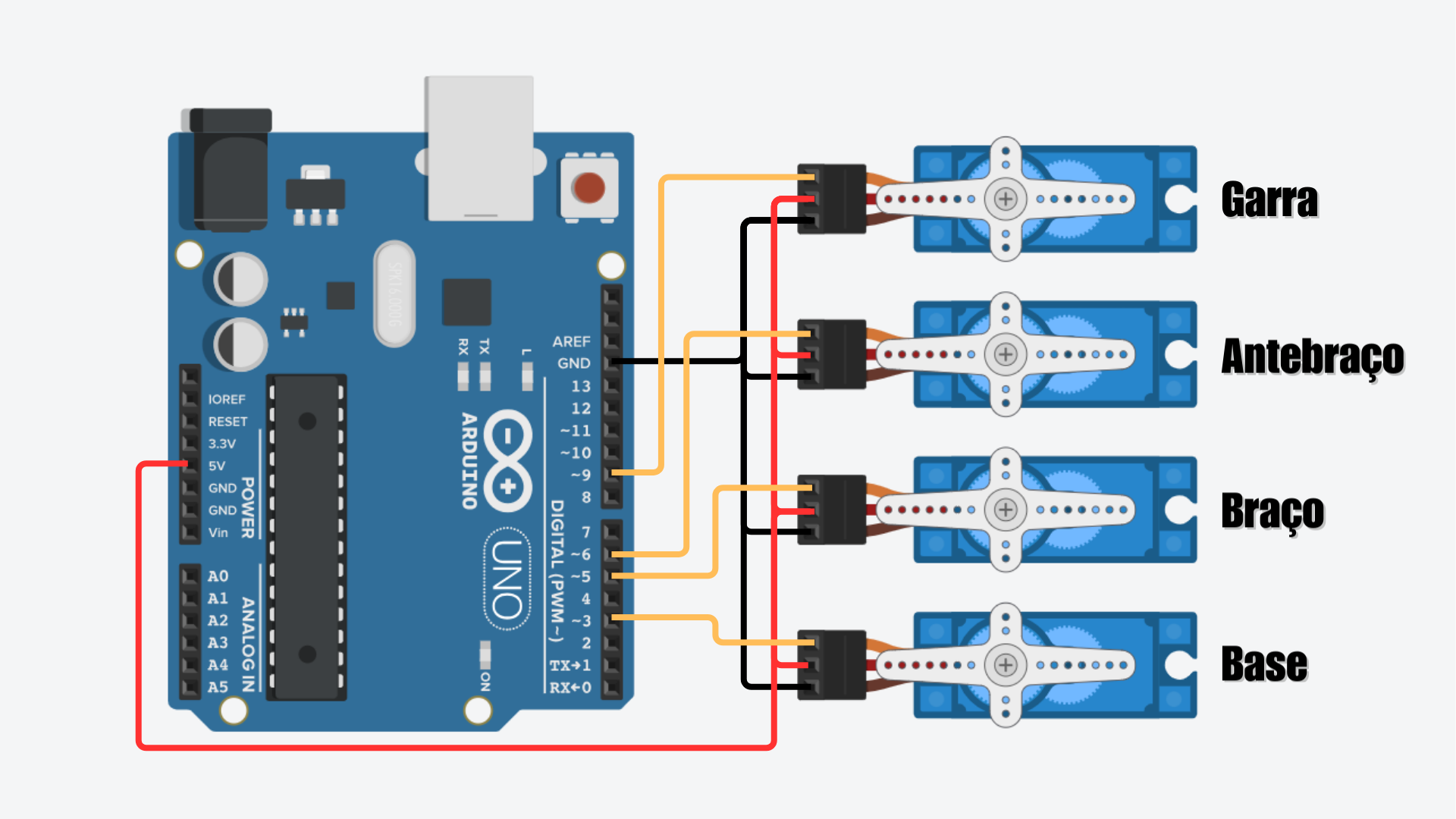
Os servos precisam ser previamente posicionados para que o controle e amplitude de movimento do braço possam ser feitos de forma correta. Para isso precisaremos conectar o servo ao Arduino e usar o Arduino IDE, caso não saiba como faze-lo clique aqui para ir até nosso post sobre os servos. Caso já tenha sua IDE instalada, siga os passos abaixo.
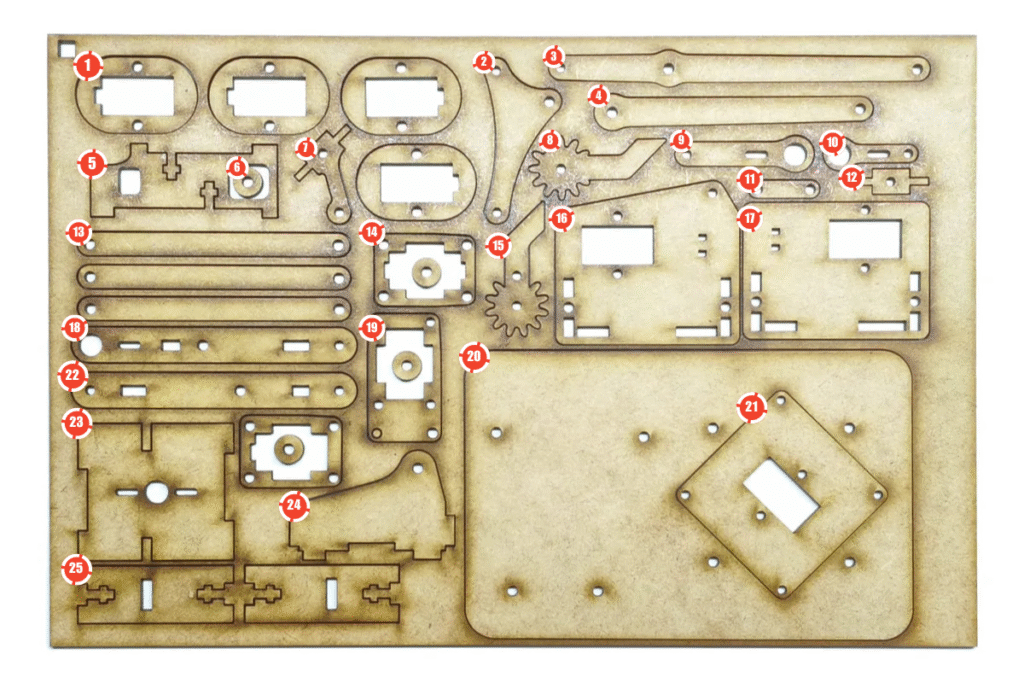
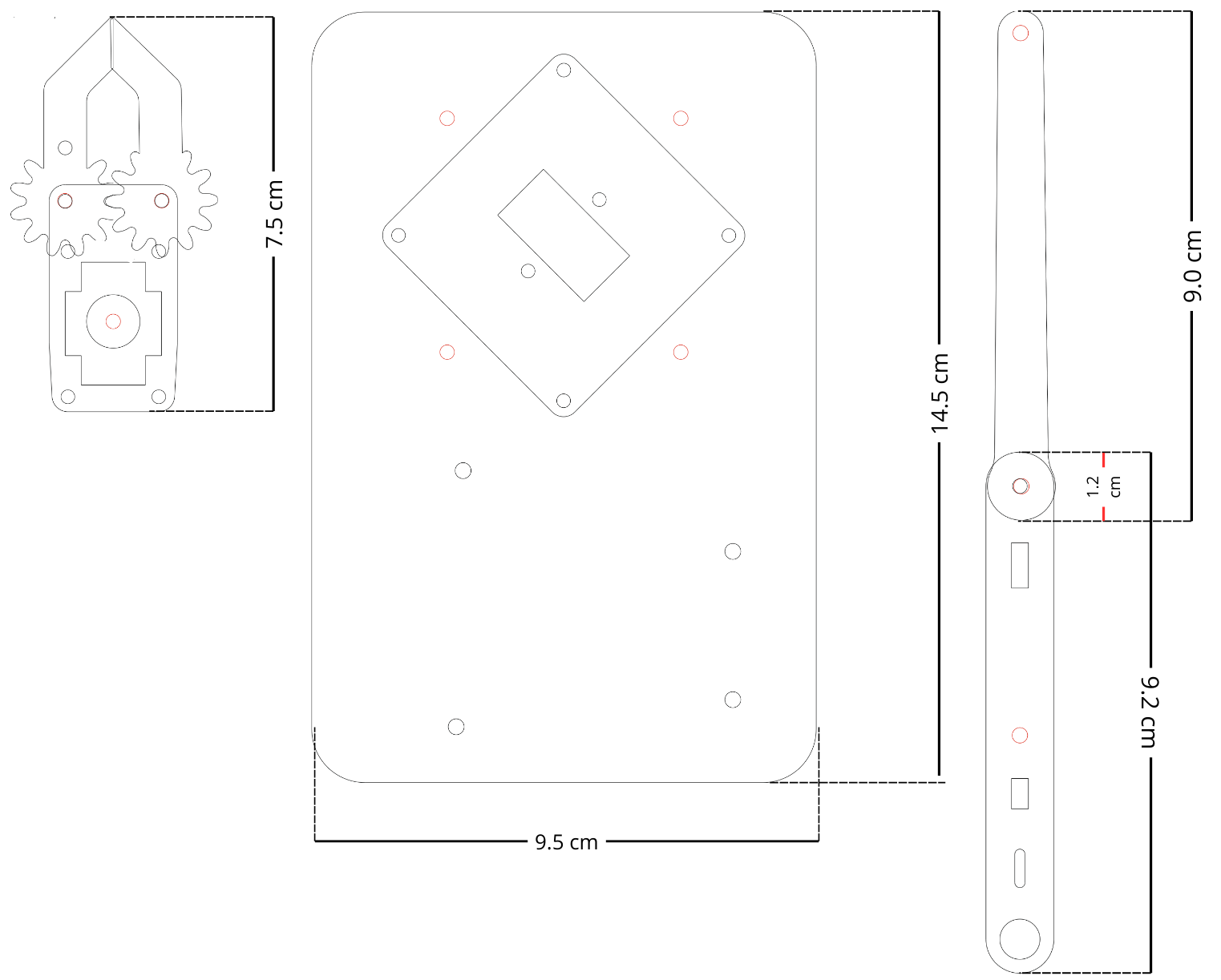
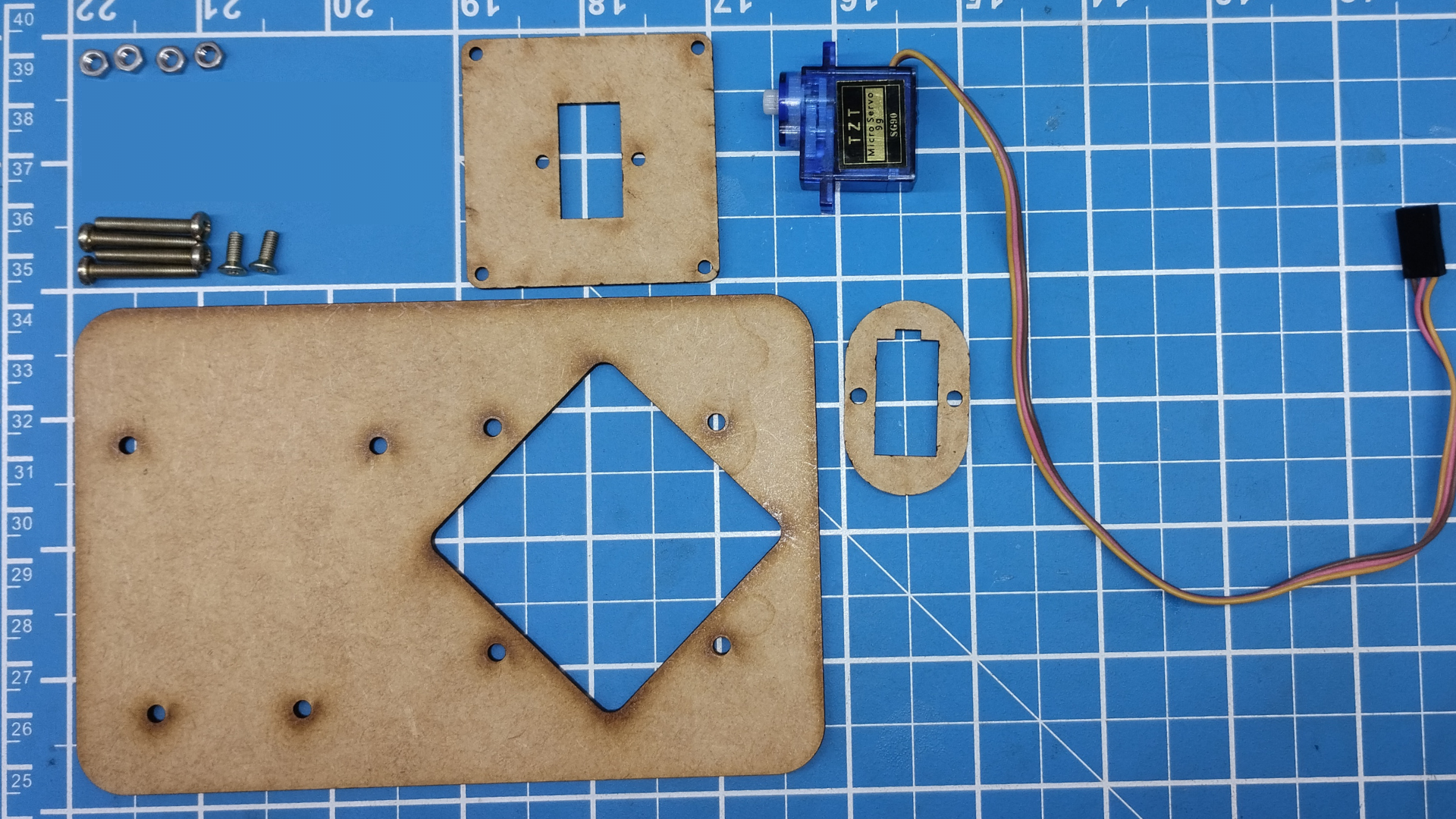
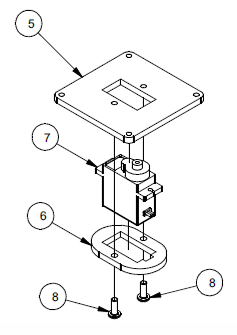
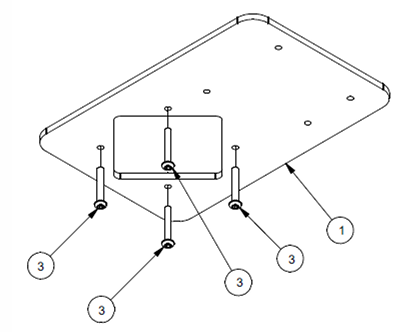
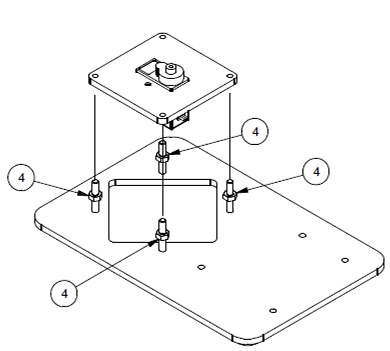
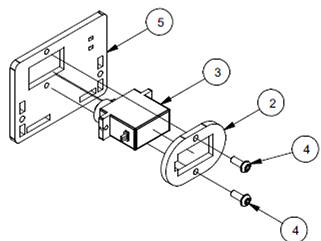
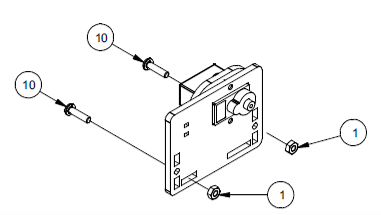
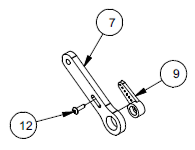
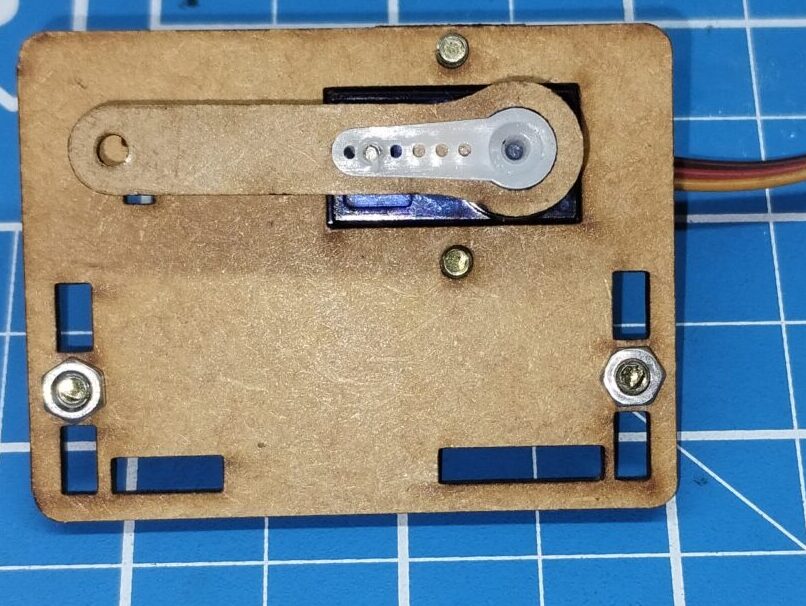
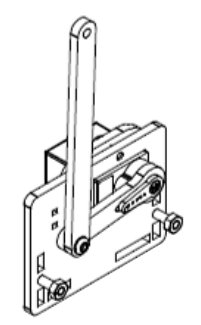
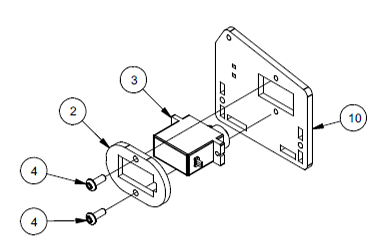
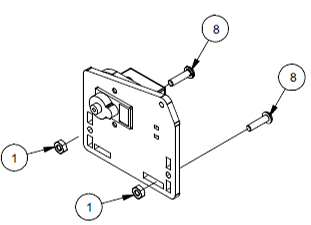
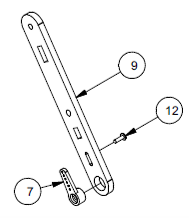
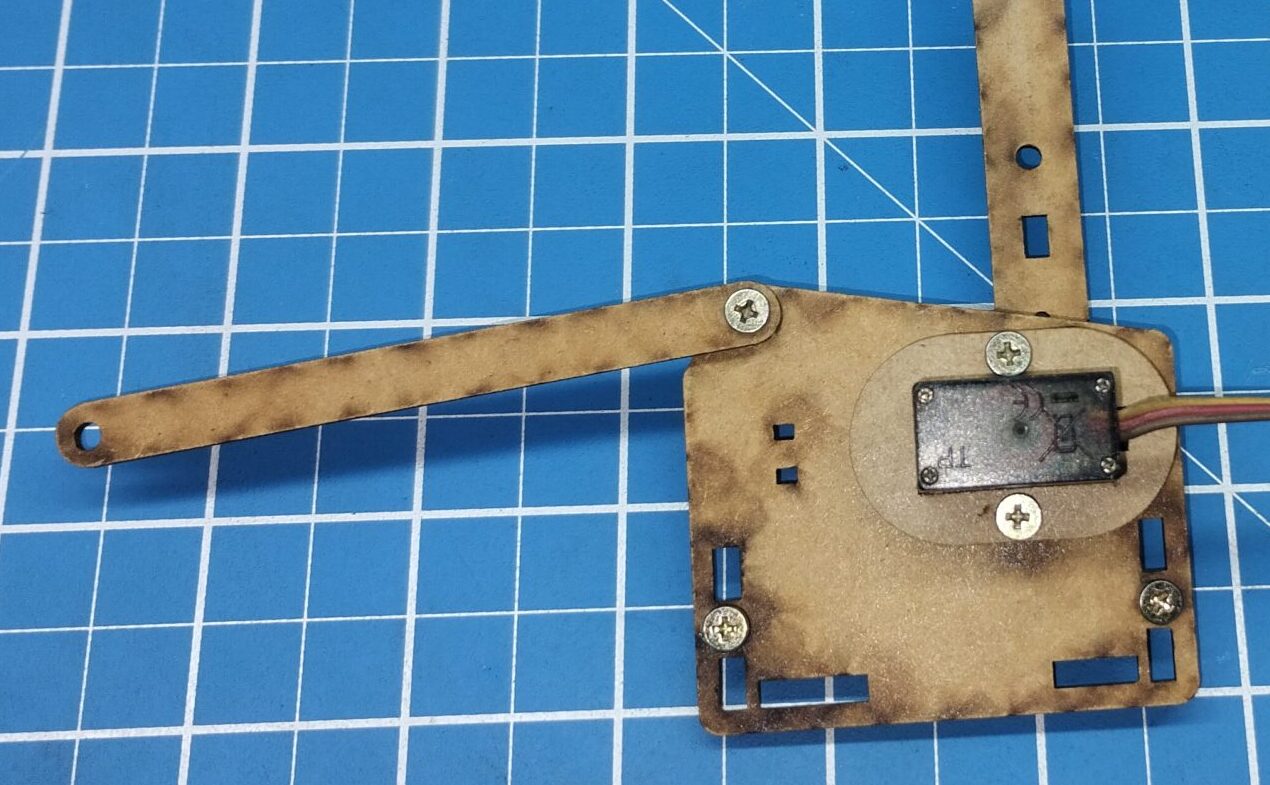
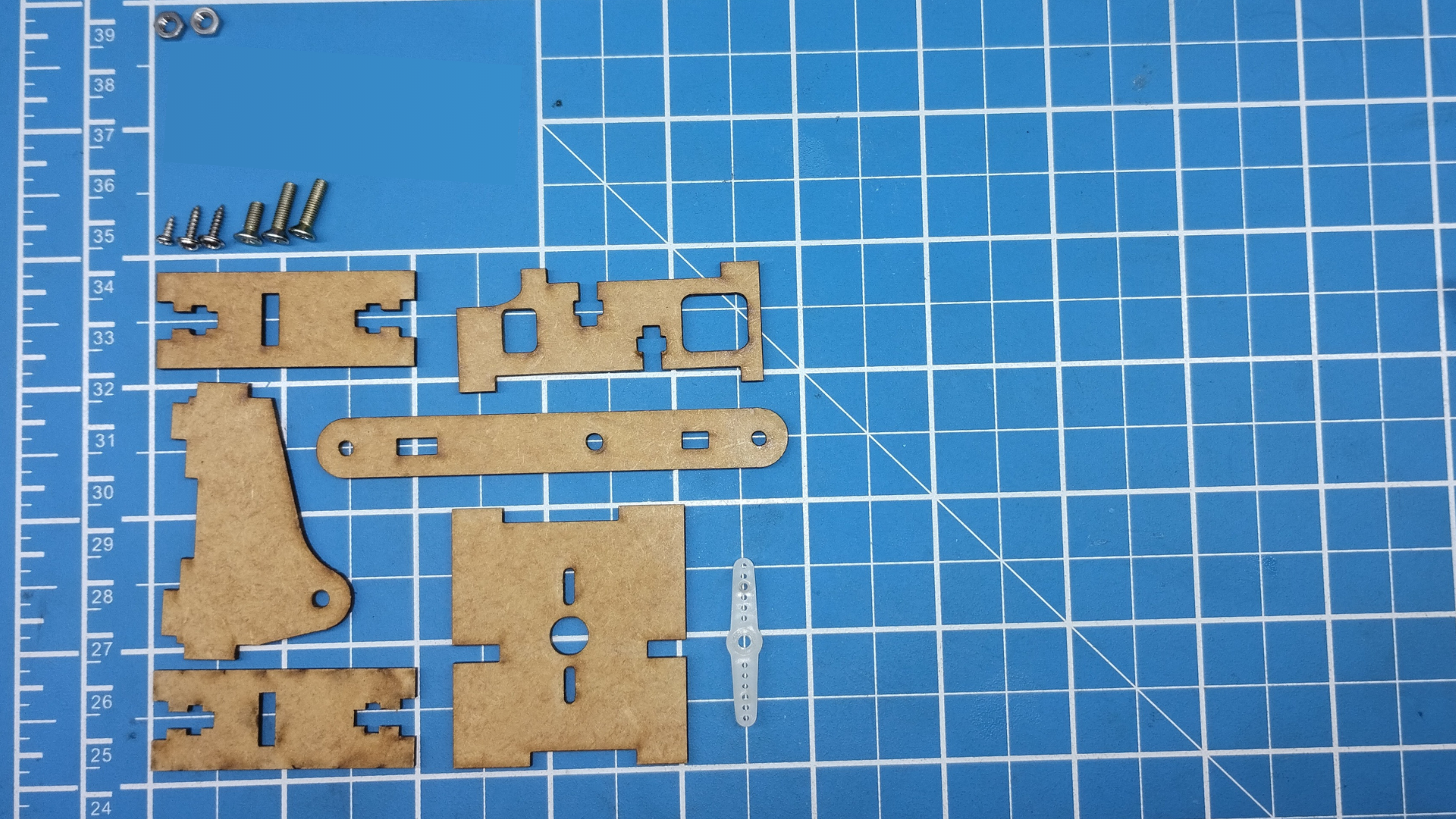
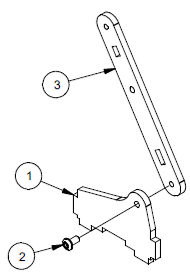
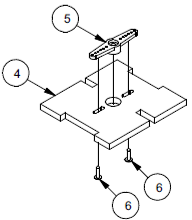
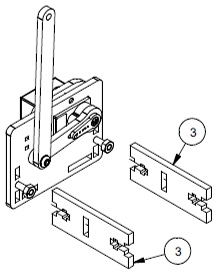
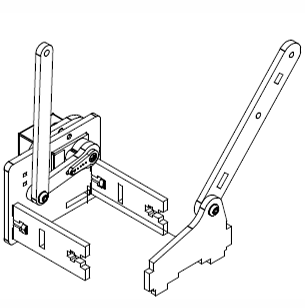
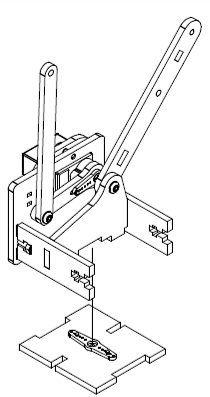
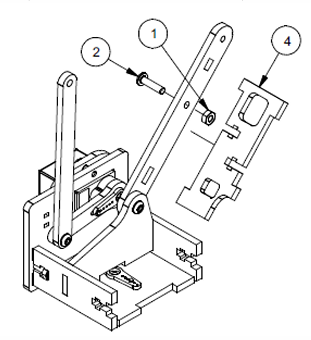
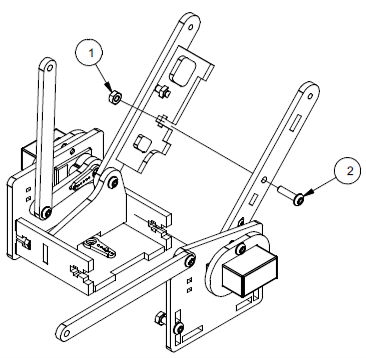
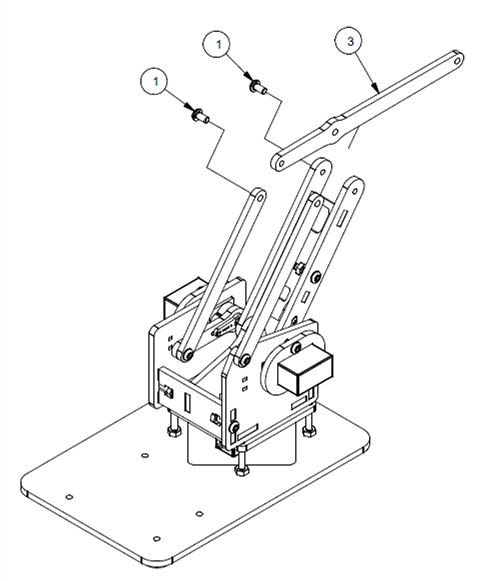
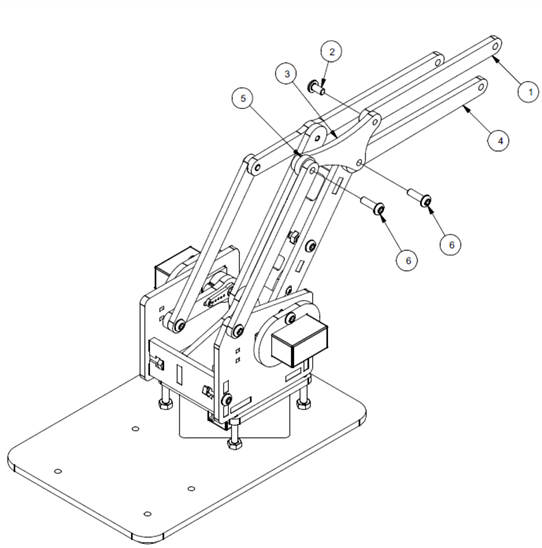
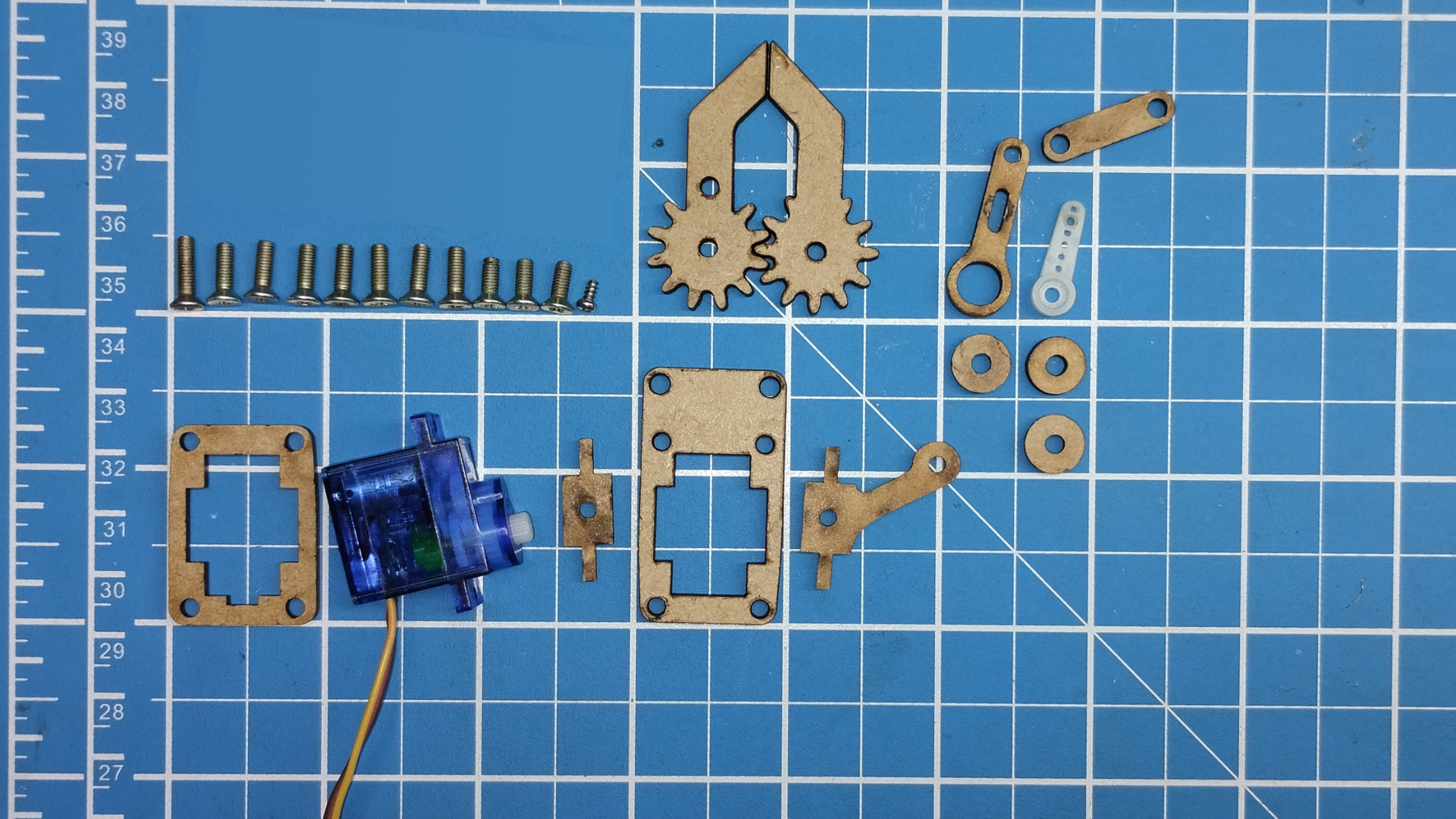
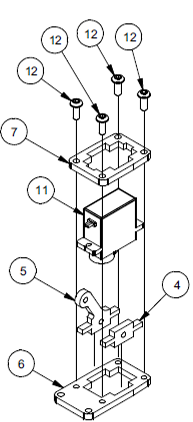
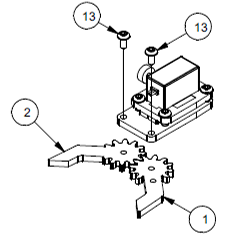
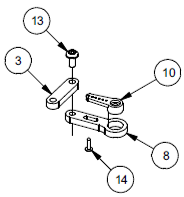
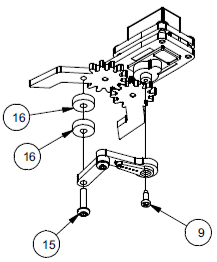
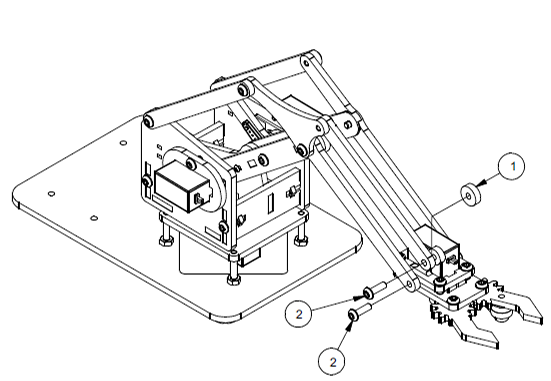
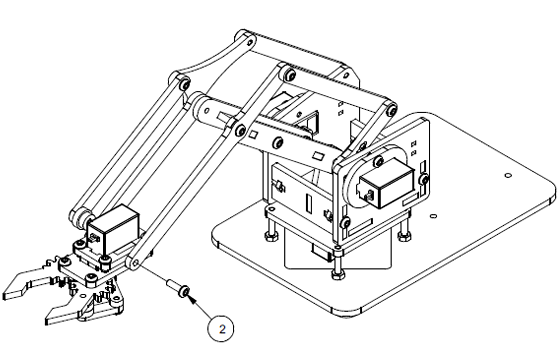
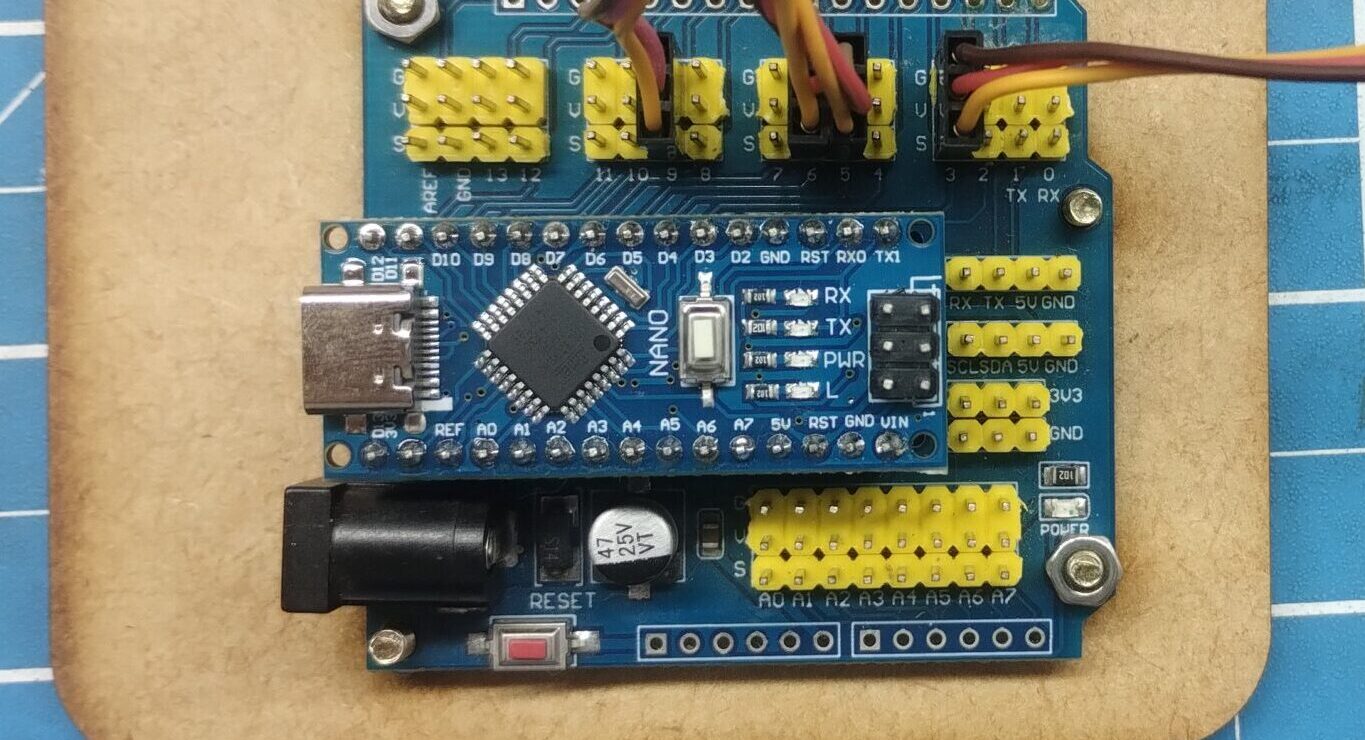
Atenção para a montagem! As placas não possuem rosca, os parafusos vão criar uma. Caso parafuse demais os furos das placas podem afrouxar. Tente alinhar os limites das placas aos limites dos parafusos.
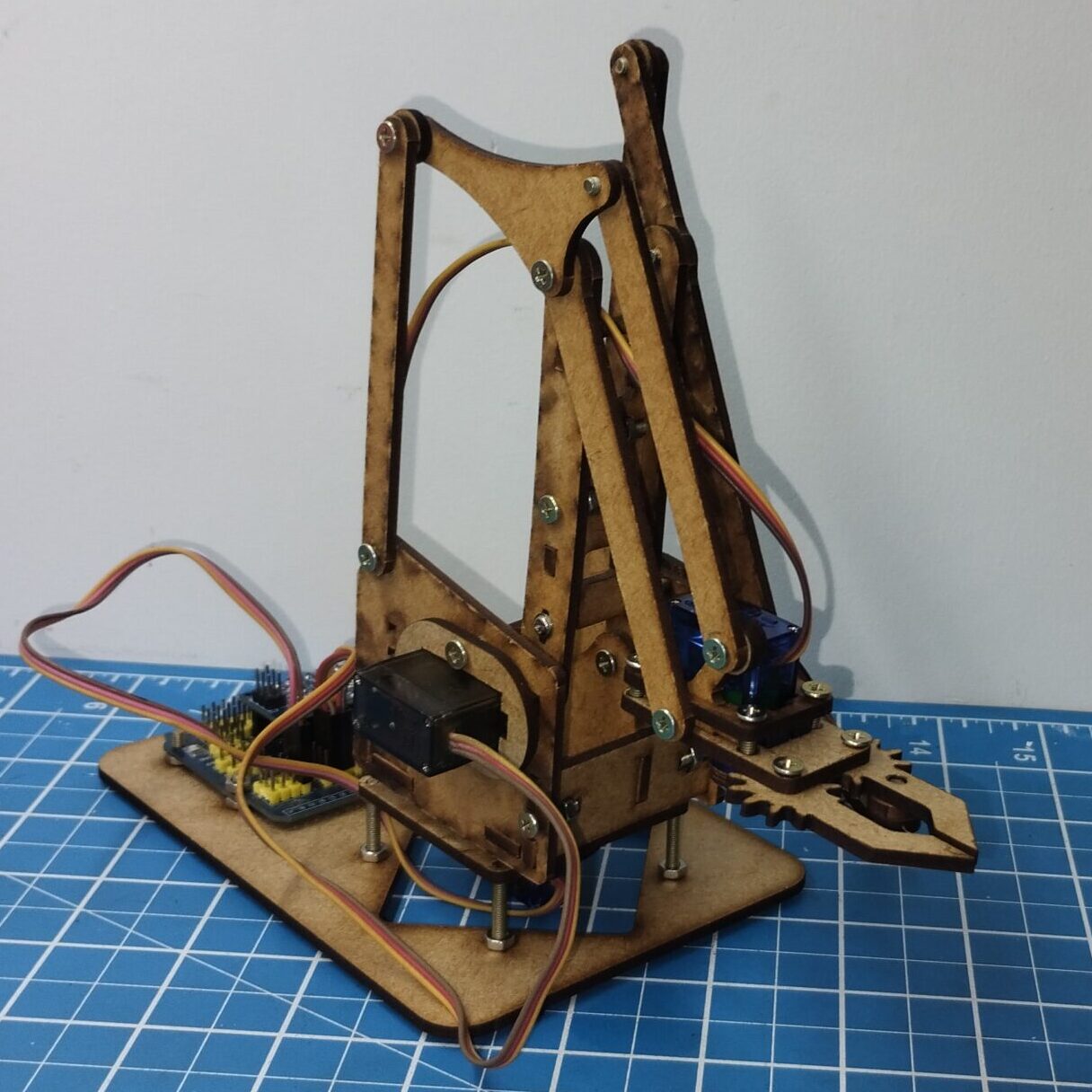
Após a montagem e conexões do circuito elétrico do projeto, vamos a programação. Caso não possua a IDE do arduino instalada, acesse esse tutorial. Este projeto visa comandar o braço de duas formas, com o joystick ou com pontos predeterminados.
- Acesse o github: https://github.com/Efraal/meArm/tree/main/
- Escolha um dos 4 códigos:
- Cinemática direta:
- Faz o controle diretamente pelos ângulos dos servos;
- Na matriz frame[][], altere os ângulos dos servos em cada etapa na seguinte ordem:
O braço robótico é uma excelente porta de entrada para a robótica em geral, tendo diversas aplicações e aprendizados úteis nas mais diversas áreas. Ele tem uma montagem simples, preço acessível e é ótimo para despertar a curiosidade em crianças e adolescentes.